物理学における効率を計算するための式。 内燃機関の効率。 どのくらいがほぼ等しいか、およびパーセントでのパワー
COEFFICIENT OF EFFICIENCY (COP) は、エネルギー変換に関するシステム (デバイス、機械) の効率の特性です。 システムに転送されるエネルギーの総量に対する使用される (循環プロセスで仕事に変わる) 有用なエネルギーの比率によって決まります。
係数 有用なアクション
(効率)、エネルギーの変換または伝達に関するシステム (デバイス、機械) の効率の特性。 システムが受け取るエネルギーの総量に対する使用される有用なエネルギーの比率によって決定されます。 通常、h = Wpol/Wcym で表されます。
電気モーターでは、効率は、電源から受け取った電気エネルギーに対する、実行された (有用な) 機械的仕事の比率です。 熱機関では ≈ 消費される熱量に対する有用な機械的仕事の比率。 変圧器では ≈ 一次巻線で消費されるエネルギーに対する二次巻線で受信される電磁エネルギーの比率。 効率を計算するには 他の種類エネルギーと機械的仕事は、熱の機械的当量と他の同様の比率に基づいて同じ単位で表されます。 効率の概念はその一般性により、原子炉、発電機とエンジン、火力発電所、半導体デバイス、生体などのさまざまなシステムを統一された観点から比較および評価することができます。
摩擦や周囲の物体の加熱などによるエネルギー損失は避けられないため、効率は常に 1 未満になります。 したがって、効率は消費されるエネルギーの分数で表されます。 適切な分数またはパーセンテージとして、無次元量です。 火力発電所の効率は 35~40% に達し、エンジン 内燃機関≈ 40≈50%、高出力ダイナモと発電機 ≈95%、変圧器 ≈98%。 光合成プロセスの効率は通常6~8%ですが、クロレラでは20~25%に達します。 熱機関の場合、熱力学の第 2 法則により、効率には作動物質が実行する熱力学的サイクル (循環プロセス) の特性によって決まる上限があります。 カルノーサイクルが最も効率的です。
機械または装置の個々の要素 (ステージ) の効率と、システム内のエネルギー変換のチェーン全体を特徴付ける効率とは区別されます。 最初のタイプの効率は、エネルギー変換の性質に応じて、機械的、熱的などになります。2 番目のタイプには、一般的、経済的、技術的、およびその他のタイプの効率が含まれます。 システムの全体的な効率は、部分効率の積、つまりステップの効率に等しくなります。
技術文献では、効率が 1 よりも大きくなるように決定されることがあります。 Wpol/Wcont の比率で効率を決定すると、同様の状況が発生します。ここで、Wcont ≈ システムの「出力」で得られる使用エネルギー、Wcont ≈ システムに入るすべてのエネルギーではなく、その一部のみです。そのために実費が発生します。 たとえば、半導体熱電ヒーター (ヒート ポンプ) の動作中の電力消費量は、熱電素子によって放出される熱量よりも少なくなります。 余分なエネルギーは 環境. この場合、プラントの真の効率は 1 未満ですが、考慮される効率 h = Wpol/Wzap は 1 より大きい場合があります。
点灯:Artobolevsky I. I.、メカニズムと機械の理論、第2版、M.≈L.、1952; 一般的な熱工学編。 S. Ya. Kornitsky および Ya. M. Rubinshtein、第 2 版、M.≈ L.、1952 年。 一般電気工学、M.≈L.、1951; Vukalovich M. P.、Novikov I. I.、テクニカル サーモダイナミクス、第 4 版、M.、1968 年。
ウィキペディア
効率
効率 (効率) - エネルギーの変換または伝達に関するシステムの効率の特性。 これは、システムが受け取るエネルギーの総量に対する使用される有用なエネルギーの比率によって決定されます。 通常は η で表されます。 効率は無次元の量であり、多くの場合パーセンテージで測定されます。
実際には、作業の一部はメカニズムの内部および個々の部品を動かすときに作用する摩擦力に対して行われるため、任意のデバイスを使用して行われる作業は常により有用な作業です。 したがって、可動ブロックを使用して、ブロック自体とロープを持ち上げ、ブロック内の摩擦力を克服する追加の作業を実行します。
次の表記法を導入します: $A_p$ で有用な作業を示し、$A_(poln)$ で完全な作業を示します。 そうすることで、次のことができます。
意味
成績係数 (COP)有用な仕事の完全な仕事の比率と呼ばれます。 効率を文字 $\eta $ で表すと、次のようになります。
\[\eta =\frac(A_p)(A_(poln))\ \left(2\right).\]
ほとんどの場合、効率はパーセンテージで表され、その定義は次の式です。
\[\eta =\frac(A_p)(A_(poln))\cdot 100\%\ \left(2\right).\]
メカニズムを作成するとき、彼らは効率を上げようとしますが、効率が1に等しい(さらには1を超える)メカニズムは存在しません。
したがって、効率係数は 物理量、これは、生産されたすべての作業のうち、有用な作業が占める割合を示しています。 効率の助けを借りて、仕事を行うエネルギーを変換または伝達するデバイス(メカニズム、システム)の効率が評価されます。
メカニズムの効率を高めるために、軸の摩擦、質量を減らすことができます。 摩擦を無視できる場合、メカニズムの質量は、たとえば、メカニズムが持ち上げる負荷の質量よりも大幅に小さい場合、効率は 1 よりわずかに低くなります。 すると、行われた仕事は有用な仕事にほぼ等しくなります。
力学の黄金律
単純なメカニズムを使用して仕事の利益を達成することはできないことを覚えておく必要があります。
式(3)の各仕事を、対応する力と、この力の影響下で移動した経路による積として表現すると、式(3)を次の形式に変換できます。
式(4)は、単純なメカニズムを使用すると、途中で失う分だけ力が増すことを示しています。 この法則は力学の「黄金律」と呼ばれています。 この規則は、アレクサンドリアのヘロンによって古代ギリシャで策定されました。
この規則は、摩擦力を克服するための作業を考慮していないため、概算です。
動力伝達効率
効率係数は、その実装に費やされるエネルギーに対する有用な作業の比率 ($Q$) として定義できます。
\[\eta =\frac(A_p)(Q)\cdot 100\%\ \left(5\right).\]
熱機関の効率を計算するには、次の式を使用します。
\[\eta =\frac(Q_n-Q_(ch))(Q_n)\left(6\right),\]
ここで、$Q_n$ はヒーターから受け取った熱量です。 $Q_(ch)$ - 冷蔵庫に伝達される熱量。
カルノー サイクルに従って動作する理想的な熱機関の効率は次のとおりです。
\[\eta =\frac(T_n-T_(ch))(T_n)\left(7\right),\]
$T_n$ - ヒーター温度; $T_(ch)$ - 冷蔵庫の温度。
効率化のためのタスクの例
例 1
エクササイズ。クレーン エンジンの出力は $N$ です。 $\Delta t$ に等しい時間間隔で、彼は質量 $m$ の荷物を高さ $h$ まで持ち上げました。 クレーンの効率は?\textit()
解決。検討中の問題における有用な仕事は、質量 $m$ の負荷の高さ $h$ まで物体を持ち上げる仕事に等しく、これは重力に打ち勝つ仕事です。 それは次と等しい:
負荷を持ち上げるときに行われる総仕事量は、動力の定義を使用して見つけることができます。
効率係数の定義を使用して見つけてみましょう。
\[\eta =\frac(A_p)(A_(poln))\cdot 100\%\left(1.3\right).\]
式 (1.1) と (1.2) を使用して式 (1.3) を変換します。
\[\eta =\frac(mgh)(N\Delta t)\cdot 100\%.\]
答え。$\eta =\frac(mgh)(N\Delta t)\cdot 100\%$
例 2
エクササイズ。 理想気体は、カルノー サイクルを実行しますが、サイクルの効率は $\eta $ に等しくなります。 一定温度での気体圧縮サイクルの仕事は? 膨張中の気体の仕事は $A_0$ です
解決。サイクルの効率は次のように定義されます。
\[\eta =\frac(A_p)(Q)\left(2.1\right).\]
カルノー サイクルを考えて、どのプロセスで熱が供給されるかを判断します ($Q$ になります)。
カルノー サイクルは 2 つの等温線と 2 つの断熱で構成されているため、断熱プロセス (プロセス 2-3 および 4-1) では熱伝達がないとすぐに言えます。 等温プロセス 1-2 では熱が供給され (図 1 $Q_1$)、等温プロセス 3-4 では熱が除去されます ($Q_2$)。 式 (2.1) $Q=Q_1$ であることがわかります。 等温プロセス中にシステムに供給される熱量 (熱力学の第 1 法則) は、完全にガスによって仕事を実行することがわかっています。つまり、次のことを意味します。
ガスは次のような有用な仕事をします。
等温過程 3-4 で取り除かれる熱量は、圧縮の仕事に等しい (仕事は負) (T=const なので、$Q_2=-A_(34)$)。 その結果、次のようになります。
結果 (2.2) - (2.4) を考慮して式 (2.1) を変換します。
\[\eta =\frac(A_(12)+A_(34))(A_(12))\to A_(12)\eta =A_(12)+A_(34)\to A_(34)=( \eta -1)A_(12)\left(2.4\right).\]
条件 $A_(12)=A_0,\ $finally により、次のようになります。
答え。$A_(34)=\left(\eta -1\right)A_0$
効率の概念(COP)は、さまざまな種類のデバイスやメカニズムに適用でき、その操作はあらゆるリソースの使用に基づいています。 したがって、システムの操作に使用されるエネルギーをそのようなリソースと見なす場合、この結果は、このエネルギーで実行される有用な作業の量と見なす必要があります。大まかに言えば、効率の式は次のように書くことができます: n = A*100%/Q。 この式では、記号 n は効率の指定として使用され、記号 A は行われた仕事の量を表し、Q は消費されたエネルギーの量を表します。 同時に、効率の測定単位がパーセントであることを強調する必要があります。 理論的には、この係数の最大値は 100% ですが、実際には、各メカニズムの動作に一定のエネルギー損失が存在するため、このような指標を達成することはほとんど不可能です。
エンジン効率
現代の自動車のメカニズムの重要なコンポーネントの 1 つである内燃機関 (ICE) は、資源 (ガソリンまたはディーゼル燃料) の使用に基づくシステムの変形でもあります。 したがって、その効率値を計算することができます。
自動車産業のすべての技術的成果にもかかわらず、内燃エンジンの標準効率は依然として非常に低く、エンジンの設計に使用されている技術によっては、25% から 60% になることがあります。 これは、そのようなエンジンの動作が重大なエネルギー損失に関連しているという事実によるものです。
したがって、内燃エンジンの効率の最大の損失は、エンジンによって生成されるエネルギーの最大40%を占める冷却システムの動作で発生します。 エネルギーの大部分(最大25%)は、排気ガスを除去する過程で失われます。つまり、単に大気中に運ばれます。 最後に、エンジンによって生成されたエネルギーの約 10% が、内燃エンジンのさまざまな部品間の摩擦を克服するために使用されます。
したがって、自動車業界で採用されている技術者とエンジニアは、上記のすべての項目の損失を減らすことによってエンジンの効率を改善するために多大な努力を払っています。 したがって、冷却システムの動作に関連する損失を減らすことを目的とした設計開発の主な方向性は、熱伝達が発生する表面のサイズを縮小する試みに関連しています。 ガス交換の過程での損失の削減は、主に過給システムを使用して実行され、摩擦に関連する損失の削減は、より多くの技術と技術を使用して実行されます。 現代の材料エンジンを設計するとき。 専門家によると、これらの技術やその他の技術を使用すると、内燃機関の効率を 80% 以上のレベルに上げることができます。
機械ユニットの効率の計算
機械ユニット - エンジン機構、伝達機構、作業機械の機構のセット。
別のモーションを考えてみましょう。 この動きの完全なサイクルごとに、運動エネルギーの増分はゼロです。
∑(mv2)/2-∑(mv02)/2=0 (1)
機械効率 (効率)は、定常運動のサイクルのすべての駆動力の仕事に対する生産抵抗力の仕事の絶対値の比率です。 したがって、式は次のように記述できます。
K.P.D. 式によって決定されます: η=Ап。 s/ヘル (2)
どこで: Aps - 生産力の仕事。
地獄は原動力の働きです。
駆動力の仕事に対する非生産抵抗の仕事ATの比率は、通常Ψで表され、機械的損失係数と呼ばれます。 したがって、式は次のように記述できます。
η \u003d AT / AD \u003d 1 - Ψ (3)
仕事のメカニズムにおける非生産的な抵抗が少ないほど、その損失係数が低くなり、エネルギーに関してメカニズムがより完全になります。
式から次のようになります。どのメカニズムにおいても、AT の仕事は抵抗の生成力ではないため、摩擦力 (霜摩擦、滑り摩擦、乾燥、半乾燥、液体、半液体) は実質的にゼロに等しくなりません。効率をゼロにすることはできません。
式 (2) から、次の場合、効率はゼロに等しいことがわかります。
これは、駆動力の仕事がメカニズムに存在する非生産的な抵抗のすべての力の仕事に等しい場合、効率がゼロに等しいことを意味します。 この場合、移動は可能ですが、何もしません。 この機構の動きを空回りと呼びます。
効率をゼロより小さくすることはできません。これには、作業 AT / IM の比率が 1 より大きい必要があるためです。
AT / BP >1 または AT > BP
これらの不等式から、指定された条件を満たすメカニズムが静止している場合、実際の運動は発生しないということになります。 セルフブレーキ機構。メカニズムが動いている場合。 次に、非生産的な抵抗力の影響下で、停止する (減速する) まで徐々に進行を遅らせます。 したがって、理論計算で効率の負の値を取得することは、メカニズムの自己制動または特定の方向への移動の不可能性の兆候です。
したがって、メカニズムの効率は次の範囲内で変化する可能性があります。
0 ≤η< 1 (4)
式 (2) から、効率 Ψ は 0 ≤η の範囲内で変化することがわかります。< 1
機械単位での機械の関係。
各マシンは、特定の方法で接続されたメカニズムの複合体であり、一部の複雑なものはより単純なものに分割でき、K.P.D. を計算する機能を備えています。 単純なメカニズムまたはK.P.D.の特定の値を自由に使用できます。 シンプルなメカニズムで、完全な K.P.D. を見つけることができます。 それらの任意の組み合わせで単純な要素で構成されたマシン。
運動と力の伝達のすべての可能なケースは、直列、並列、および混合接続のケースに分けることができます。
K.P.D.を計算する場合 N1=N2=N3=N4、η1=η2=η3=η4=0.9 の 4 つのメカニズムからなる集合体を使用します。
駆動力 (BP) = 1.0 を受け入れます。
K.P.D. を検討してください。 シリアル接続。
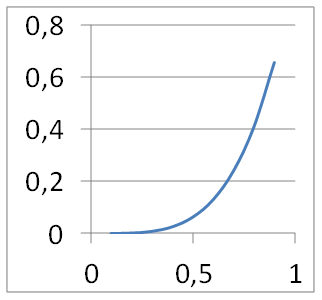 最初のメカニズムは、地獄の働きをする原動力によって動き始めます。 生産抵抗に費やされた以前の各メカニズムの有用な仕事は、後続の各メカニズムの原動力の仕事であるため、K.P.D。 最初のメカニズムの η は次のとおりです。
最初のメカニズムは、地獄の働きをする原動力によって動き始めます。 生産抵抗に費やされた以前の各メカニズムの有用な仕事は、後続の各メカニズムの原動力の仕事であるため、K.P.D。 最初のメカニズムの η は次のとおりです。
2番目 - η\u003d A2 / A1
3番目 - η\u003d A3 / A2
4番目 - η\u003d A4 / A3
総合効率η1n=An/Ad
この効率係数の値は、すべての個々の効率係数 η1、η2、η3、η4 を乗算することによって取得できます。 我々は持っています
η=η1*η2*η3*η4=(A1/AD)*(A2/A1)*(A3/A2)*(A4/A3)=An/AD (5)
したがって、メカニズムの直列接続の全体的な機械効率は、1 つの共通システムを構成する個々のメカニズムの機械効率の積に等しくなります。
η=0.9*0.9*0.9*0.9=0.6561=Ap。 と。
K.P.D. を検討してください。 並列接続。
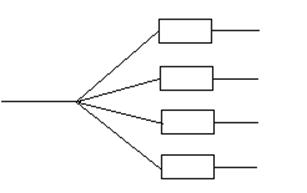 メカニズムが並列に接続されている場合、2 つのケースが考えられます。1 つの動力源から電力が複数の消費者に送信され、複数の電源が 1 つの消費者に並列に供給されます。 ただし、最初のオプションを検討します。
メカニズムが並列に接続されている場合、2 つのケースが考えられます。1 つの動力源から電力が複数の消費者に送信され、複数の電源が 1 つの消費者に並列に供給されます。 ただし、最初のオプションを検討します。
この接続で: Ap. s.=A1+A2+A3+A4
もしK.P.D. 各メカニズムは同じであり、電力は各メカニズムに均等に分配されます: ∑КI=1 の場合 ⇒ К1=К2=К3=К4=0.25.
次に: η=∑Кi*ηi (6)
η =4(0.25*0.90)=0.90
したがって、全体の K.P.D. ユニットチェーンの個々のセクションの積の合計としての並列接続。
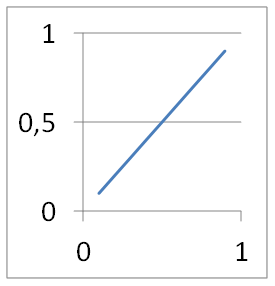
混合化合物の効率を考えてみましょう。
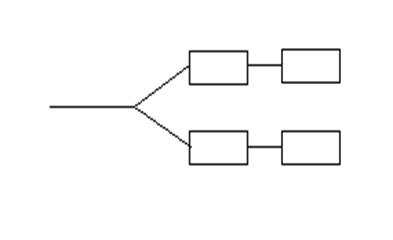 この場合、メカニズムのシリアル接続とパラレル接続の両方があります。
この場合、メカニズムのシリアル接続とパラレル接続の両方があります。
この場合、電力 Ad は 2 つのメカニズム (1.3) に転送され、それらから残りのメカニズム (2.4) に転送されます。
η1*η2=A2 および η3*η4=A4 であり、K1=K2=0.5 であるためです。
 A2 と A4 の合計は Ap に等しくなります。 と。 次に、式(1)からK.P.Dを見つけることができます。 システム
A2 と A4 の合計は Ap に等しくなります。 と。 次に、式(1)からK.P.Dを見つけることができます。 システム
η=К1*η1*η2+К2*η3*η4 (7)
η=0.5*0.9*0.9+0.5*0.9*0.9=0.405+0.405=0.81
したがって、全体の K.P.D. 混合接続は、直列に接続された機械係数の積の合計に駆動力の一部を掛けたものに等しくなります。
効率を改善する方法
現在、エンジニアの主な取り組みは、エンジンの部品の摩擦、不完全燃焼による燃料損失などを減らすことによってエンジンの効率を上げることを目的としています。ここでの効率を上げる本当の可能性はまだ大きく、アクションは次のようになります。さまざまな種類のエネルギー損失による効率の実際の値は、約 40% です。 最大効率 - 約 44% - は内燃機関です。 熱機関の効率は、最大可能値の 40 ~ 44% を超えることはできません。
結論: メカニズムの各接続を個別に考えると、並列接続の最高効率は η=0.9 に等しいと言えます。 したがって、集約では、並列接続を使用するか、できるだけそれに近い接続を使用するようにしてください。
効率計算 - 4.0 のうち 5 に基づいて 3 票
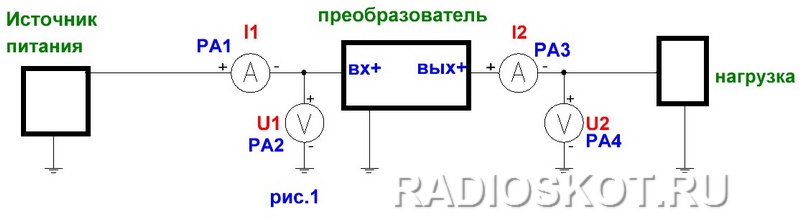
この記事ではおなじみのものに焦点を当てますが、多くの人は成績係数 (COP) という用語を理解していません。 それは何ですか? それを理解しましょう。 性能係数、以下(COP)と呼びます-エネルギーの変換または伝達に関連する、あらゆるデバイスのシステムの効率の特性。 これは、システムが受け取るエネルギーの総量に対する使用される有用なエネルギーの比率によって決まります。 通常はマークされていますか? (" これ")。 ? = Wpol/Wcym。 効率は無次元の量であり、多くの場合パーセンテージで測定されます。 数学的には、効率の定義は次のように書くことができます。 エネルギー保存の法則により、効率は常に 1 より小さいか、1 に等しくなります。 さまざまなサイトを調べていると、アマチュア無線家が、それが何であるかを知らずに、その高効率について報告する、というか、自分たちの設計を賞賛する方法に驚かされることがよくあります。 明確にするために、例を使用して、単純化されたコンバータ回路を検討し、デバイスの効率を見つける方法を学習します。 簡略化した図を図 1 に示します。ユニポーラから増加したユニポーラへのステップアップDC / DC電圧コンバータ(以下、PNと呼びます)を基本として考えたとします。 電源遮断器でPA1電流計をオンにし、電源入力PNと並行してPA2電圧計をオンにします。その読み取り値は、デバイスと負荷の消費電力(P1)を電源から一緒に計算するために必要です。 PN出力には、PNから負荷(P2)が消費する電力を負荷の電源遮断まで計算するために必要なRAZ電流計とRA4電圧計もオンにします。 これで、効率を計算する準備がすべて整ったので、始めましょう。 デバイスの電源を入れ、機器の読み取り値を測定し、パワー P1 と P2 を計算します。 したがって、P1=I1 x U1、および P2=I2 x U2 です。 ここで、効率 (%) = P2: P1 x100 という式を使用して効率を計算します。 これで、デバイスの実際の効率について学習しました。 同様の式を使用して、次の式に従ってPNと2極出力を計算できます:効率(%)\u003d(P2 + P3):P1 x100、およびステップダウンコンバーター。 値(P1)には、例えば、PWMコントローラ、および(または)電界効果トランジスタを制御するためのドライバ、および他の構造要素などの電流消費も含まれることに留意されたい。
参考までに:カーアンプのメーカーは、アンプの出力パワーが実際よりもはるかに高いことを示していることがよくあります。 しかし、簡単な式を使用して、カーアンプの概算の実際の電力を見つけることができます。 + 12v電源回路のオートアンプに50 Aのヒューズがあるとしましょう.P \u003d 12V x 50Aを計算すると、合計で600ワットの消費電力が得られます. 高品質で高価なモデルでも、デバイス全体の効率が 95% を超えることはほとんどありません。 結局のところ、効率の一部は、強力なトランジスタ、トランス巻線、整流器の熱の形で放散されます。 計算に戻りましょう。600 W が得られます: 100% x92 = 570W。 したがって、メーカーが書いているように、1000 Wでも800 Wでも、このカーアンプは出力されません。 この記事が、効率などの相対的な価値を理解するのに役立つことを願っています! デザインの開発と繰り返しの皆さん、頑張ってください。 インバーターを持っていました。